Soft Body
The Soft Body physics component introduces advanced simulation capabilities for deformable objects, enabling users to achieve soft, elastic, and dynamic effects in 3D scenes. Unlike traditional dynamic objects, soft body physics does not require a bone structure, making it versatile for a wide range of 3D models.
The Rigid Body component is ideal for objects that do not deform, focusing on movement and collision, while the cloth simulation is specialized for flexible, fabric-like materials. In contrast, the Soft Body component is best suited for objects that require realistic deformation under external forces.
Add a Soft Body Component
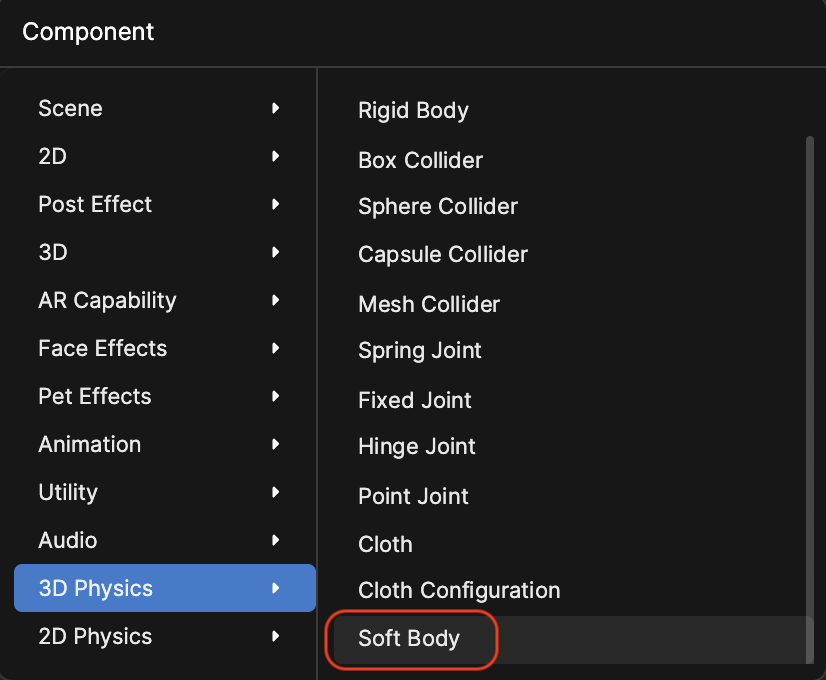
To add a Soft Body component to an object:
- Select a 3D object in the Hierarchy panel
- Click + Add component in the Inspector panel
- Go to 3D Physics
- Select Soft Body
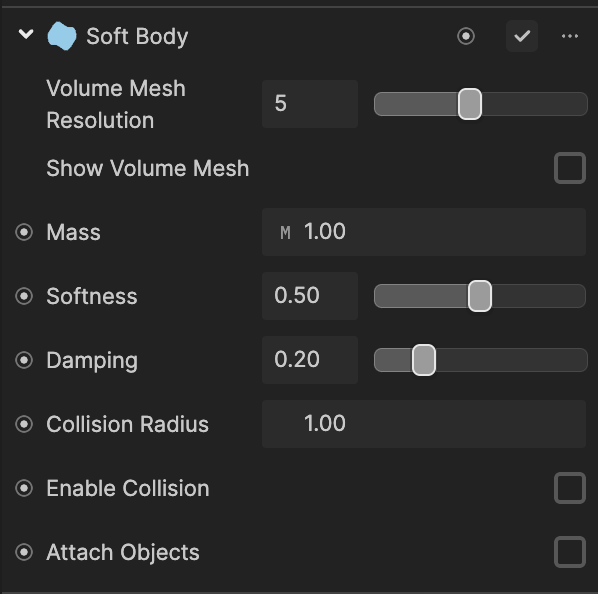
Properties
| Property | Description |
|---|---|
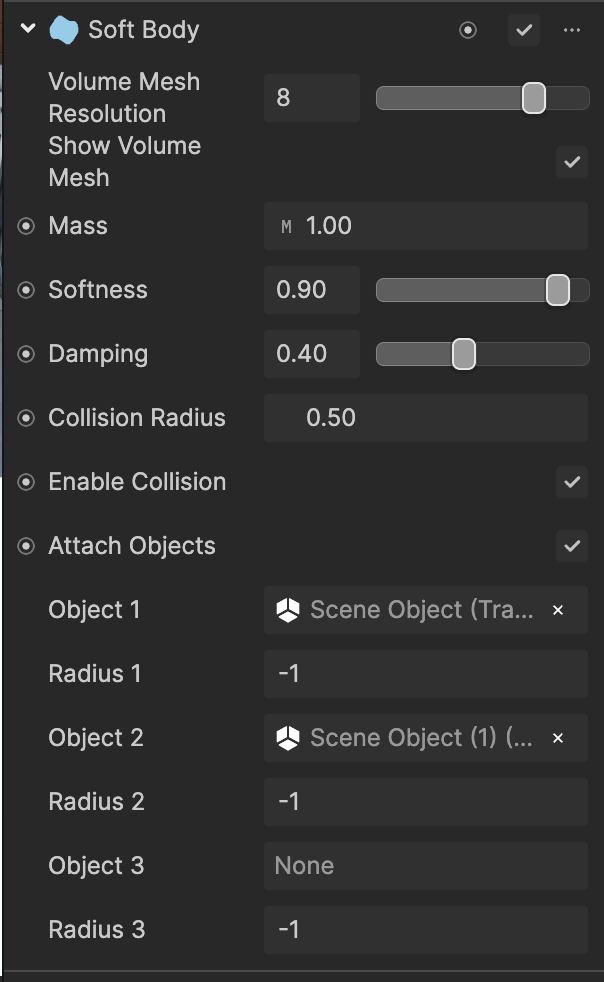
| Volume Mesh Resolution | Determines the resolution of the internal mesh used for simulation. A higher resolution increases the number of tetrahedrons generated, leading to more accurate deformations but at the cost of performance. |
| Show Volume Mesh | Enables the visibility of the internal volume mesh |
| Mass | Represents the weight of the soft body object in the effect, influencing its response to external forces such as gravity or collisions. Higher mass values result in less movement under the same force, simulating heavier materials. |
| Softness | Controls the compliance of the material, determining how easily it deforms under applied forces. Adjust this to simulate materials ranging from rigid (like wood) to elastic (like jelly). |
| Damping | Controls how quickly the soft body loses energy and returns to its resting shape after being deformed. Higher damping values are suitable for simulating materials like rubber that return to their original shape quickly. |
| Collision Radius | Sets the effective radius for collision detection around the soft body vertices. Larger values increase the collision area. |
| Enable Collision | Enables collision detection for the soft body. When enabled, the soft body can interact with rigid bodies and other collidable objects. |
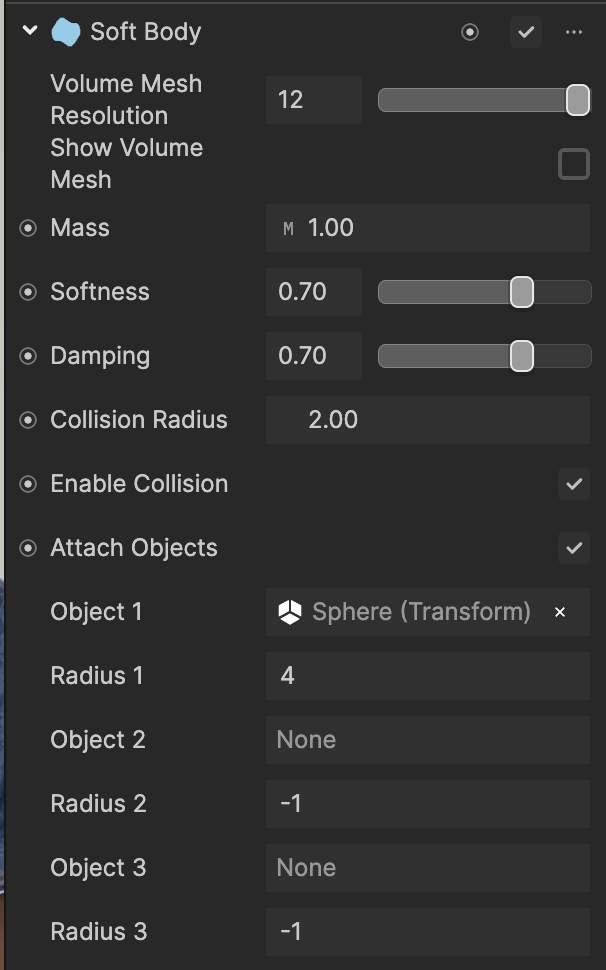
| Attach Objects | Allows the soft body to be anchored or linked to other objects for combined behaviors. Attach soft bodies to simulate scenarios like cloth tethered to poles or elastic bands tied to objects.
|
Collision Effects
- Soft bodies can collide with rigid bodies but cannot collide with other soft bodies
- Collision effects do not require additional collider components, similar to cloth simulation logic
Example Use Cases
Dynamic deformations: Create jiggling effects for soft materials such as rubber or gelatin
Interactive AR effects: Combine with head or body tracking for enhanced AR experiences (for example, bouncing cheeks and wobbling objects)

Collision simulations: Add realism to interactive scenarios like catching or throwing soft objects
Supported Models
Soft body physics is compatible with closed mesh models only. Models must meet the following requirements:
- Maximum of 59657 triangles
- Maximum of 29800 vertices
- Models exceeding these limits will prompt a warning